



3 Degree Freedom Hand
Description:
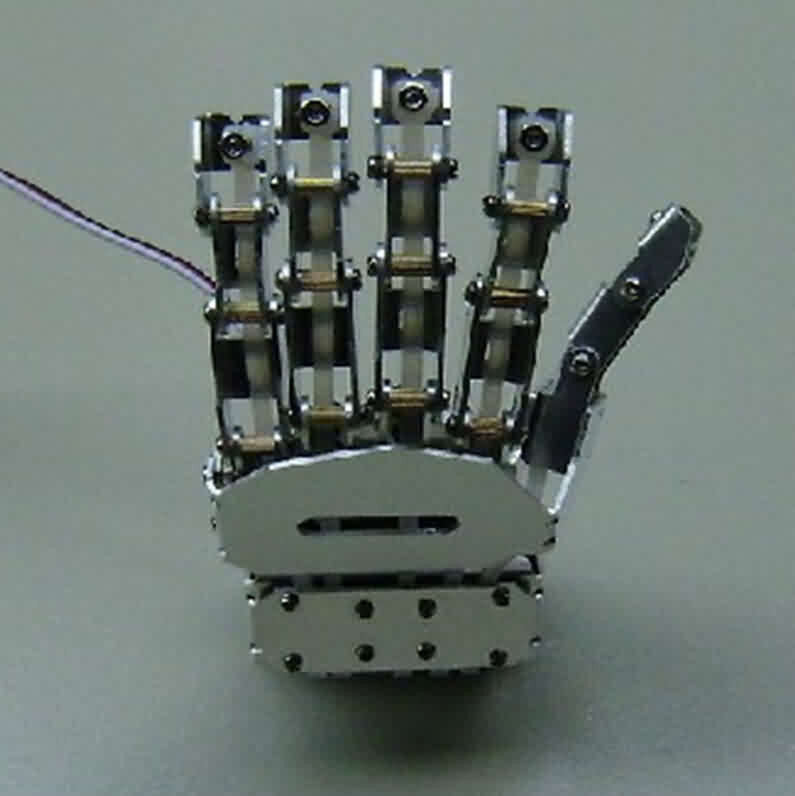
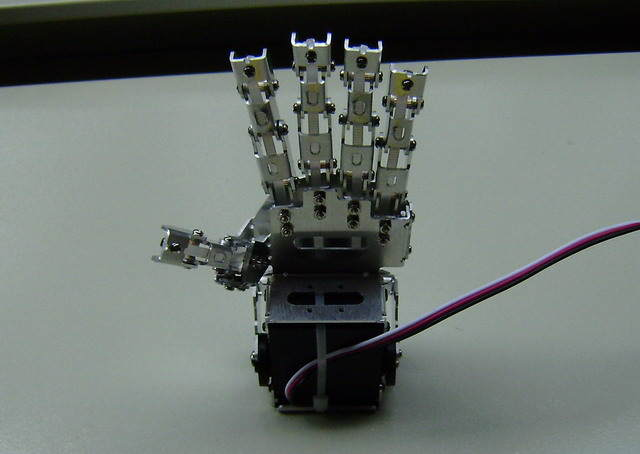
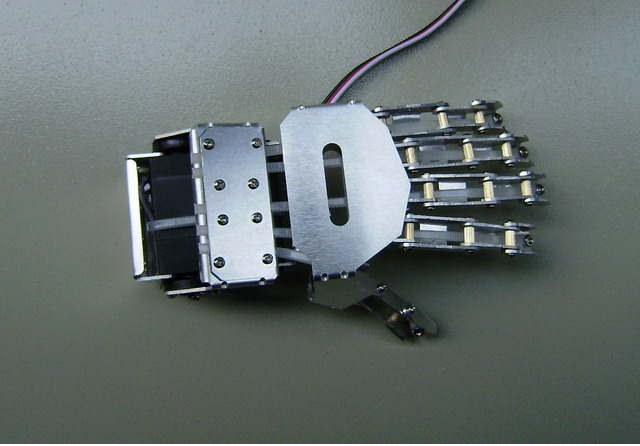
This mini size hand was designed and developed for enthusiasts in entry level robotic projects. The fingers and thumb are operated by a robot servo motor in order for the joints to move. To ensure it functions properly, it is best to not have it over-loaded or instruct it to make big movements.
Hobbyists can write their own programming codes to make it functional.
Packing List:
1) All the joints and pulling cables needed for assembly, excluding servo motor;
2) 15 pieces of M3 standoffs;
3) M2 / M2.5 / M3 screws and nuts that are needed;
4) 5 pieces of cable.







